| How to Fix FPV Drone Flips Over Taking Off Issues (Quad pops up then disarmed) | 您所在的位置:网站首页 › flips out › How to Fix FPV Drone Flips Over Taking Off Issues (Quad pops up then disarmed) |
How to Fix FPV Drone Flips Over Taking Off Issues (Quad pops up then disarmed)
|
10.6K Have you ever completed a new FPV drone build, only to face frustration when it flips over or refuses to take off whenever you arm it? You are not alone, this is a very common issue. Typically, the issue is usually due to incorrect configuration, or faulty components but this is rare. In this guide, we will help you troubleshoot the problem.  Some of the links on this page are affiliate links. I receive a commission (at no extra cost to you) if you make a purchase after clicking on one of these affiliate links. This helps support the free content for the community on this website. Please read our Affiliate Link Policy for more information. Some of the links on this page are affiliate links. I receive a commission (at no extra cost to you) if you make a purchase after clicking on one of these affiliate links. This helps support the free content for the community on this website. Please read our Affiliate Link Policy for more information. If you’ve followed our guide to build and setup your FPV drone, you should have avoided many potential causes that can ruin your first takeoff. If you haven’t checked it out yet, it’s not too late – you might still learn something valuable. Now, let’s get back to work and address these issues! Table of Contents Propellers Installed IncorrectlyIf your drone can’t take off, the first thing you should check is the propellers.
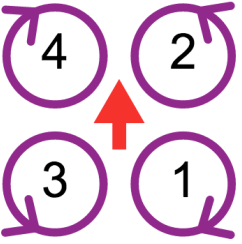
For the default motor direction (with the “Motor direction is reversed” option disabled in the Motors tab in Betaflight Configurator), ensure the propellers are installed as shown in the image above. This configuration is commonly called “props in”. When the motor direction is reversed, it’s referred to as “props out”. For beginners, we recommend leaving this option disabled (as it’s the default) to avoid confusion.
Also, ensure the propellers aren’t installed upside down. The top side typically has a glossy finish with small extruding model numbers on the leading edge near the hub, while the bottom side features a matte finish. Further Reading: What differences does reversing motor direction make?Make sure all the propeller nuts are securely fastened. A motor with a loose propeller generates little to no lift. Make sure all prop nuts are tightened and that the props can’t move when holding down the motor bell. Get a proper prop nut tool for efficient fastening: https://oscarliang.com/fpv-tools/#Prop-Nut-Tools Incorrect Motor Spin DirectionFor the rest of this troubleshooting guide, remove all propellers for safety. Check the spin direction of the motors. If you’re running “props in” (with the “Motor direction is reversed” option disabled), ensure the motors spin according to the arrows in the diagram: Motor 1: Spinning clockwise Motor 2: Spinning counterclockwise Motor 3: Spinning counterclockwise Motor 4: Spinning clockwise
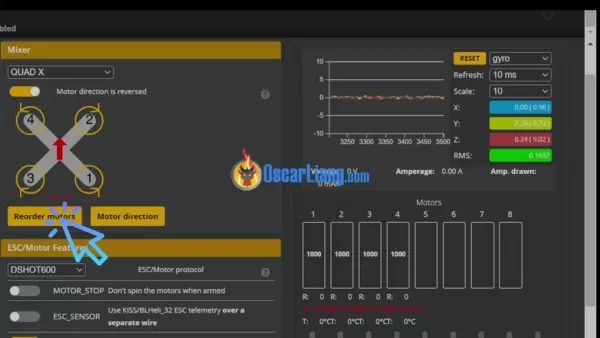
For “props out”, the motors should spin in the opposite direction. To check and reverse motor direction, use the “Motor Direction” tool: Plug in the battery to power up your drone. Go to the Motors tab in Betaflight Configurator. Click on “Motor Direction” under the quadcopter image, and use the wizard to check and reverse motor spin directions.Here’s a short video on how it works.
Other methods of reversing motor direction include swapping two motor wires and adjusting the ESC configuration as explained in this post: https://oscarliang.com/reversed-motor-prop-rotation-quadcopter/ Incorrect Motor OrderQuadcopter motors are labeled 1, 2, 3, and 4 in this order: Rear left: 1 Front left: 2 Rear right: 3 Front right: 4
To check motor order, go to the Motors tab in Betaflight Configurator, and spin each motor one by one using the sliders at the bottom of the screen (make sure to check the “I understand the risk…” option first). Confirm if the spinning motor corresponds to the motor number.
If the motors are in the wrong order, you can correct this issue in a few ways. The easiest method is to use the “Reorder Motor” wizard: Plug in the battery to power up your drone. Go to the Motors tab in Betaflight Configurator. Click on “Reorder Motors” under the quadcopter image, and use the wizard to check and reorder your motors.Here’s a short video on how it works.
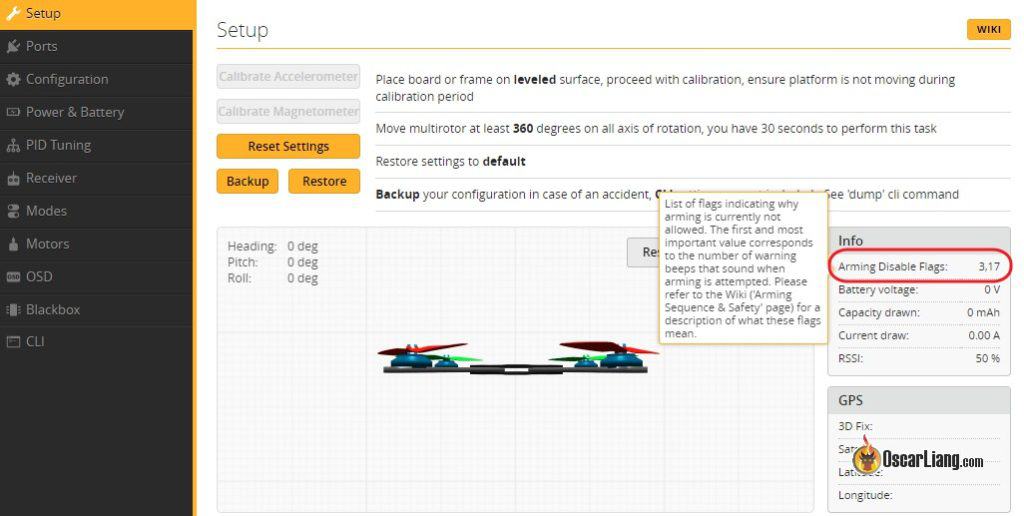
Alternatively, you can swap the ESC signal wires on the flight controller or remap motor output in Betaflight CLI. Motor Screw Contact with WindingsIf a motor screw is too long and touches the motor windings, it can create an electrical short in the motor. The motor may appear to spin up just fine when you arm it, but the quad could flip over immediately upon trying to lift off the ground. Running the motor like this for an extended period can cause overheating, potentially damaging both the motor and ESC. To check if your motor screws are touching the windings, follow this guide: https://oscarliang.com/check-motor-screws-touching-winding/ Verifying Flight Controller OrientationIf your drone still isn’t taking off, the issue may be the flight controller orientation. There’s an arrow on flight controllers, and the arrow should point forward when you install it in the frame. Incorrect orientation can cause your drone to flip out or fail to take off. To verify, connect your drone to Betaflight Configurator, and navigate to the Setup tab, where you’ll see a 3D representation of your quad.
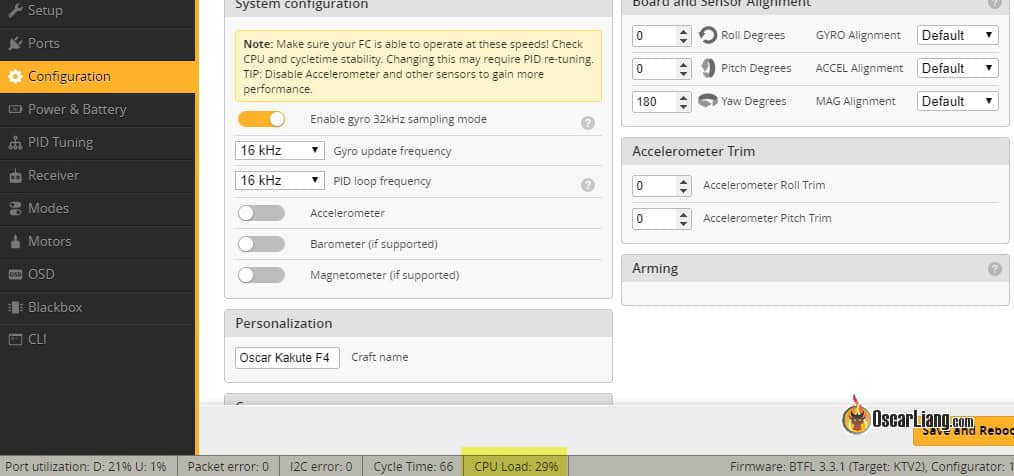
As you tilt your drone on all axes (roll, pitch and yaw) with your hands, the 3D model in the configurator should move the same. If it does not, ensure your Accelerometer is turned on, you can enable it in the Configuration tab. If Accelerometer is enabled, but the 3D model isn’t following the movement of your quad correctly, the flight controller likely has an incorrect orientation. To fix this, either rotate your flight controller physically inside the drone, or change the “Board Alignment” parameters in the Configuration tab. Most people find the latter solution easier as it avoids messing with wiring or making the USB port inaccessible. To do this, go to the Configuration tab and locate the “Board and Sensor Alignment” section.
In most cases, you only need to change the “Yaw Degrees”. If you’re unsure what value to use, try 0, 90, 180, or 270 degrees – one of these should work. In rare cases, you might need to correct “Roll Degrees” and “Pitch Degrees” as well, for example when you’ve mounted the FC board upside down. Do not change the “GYRO Alignment” and “ACCEL Alignment options. Turtle Mode Activated By AccidentTurtle mode (also known as “Flip over after crash”) is an incredibly useful feature that flips your quad back upright when it’s downed and overturned. However, if Turtle mode is accidentally enabled, you might experience difficulties taking off. If your quad doesn’t respond to throttle changes but flips out when you adjust pitch or roll, this is likely the cause. If you have Betaflight OSD enabled and displaying “warning”, you should see “CRASH FLIP” in your OSD to confirm this. If this is the case, check if you’re unintentionally activating the feature. Alternatively, you can try disabling “Flip Over After Crash” in the Modes tab. ESC Protocol CompatibilityIf you use an ESC protocol that your ESC doesn’t support, your quad might behave unexpectedly. Most ESCs on the market currently support DShot600, and since DShot doesn’t require ESC calibration (which can also cause issues), it’s the recommended protocol to use. If you’re unsure whether your ESC supports DShot, try Standard PWM, which is supported by all ESCs. This will help you determine if it’s a protocol-related issue. You can change the ESC protocol in the Configuration tab. Check Motor Mixer
In the Motors tab, you’ll find an option called “Mixer”. This option determines which motors to run and adjusts the percentage of throttle applied to each motor. You’ll typically only need to modify this setting when using an unusual frame or motor configuration. For a standard quadcopter, you should leave it at the default setting – “Quad X”. Is Receiver Working Properly?
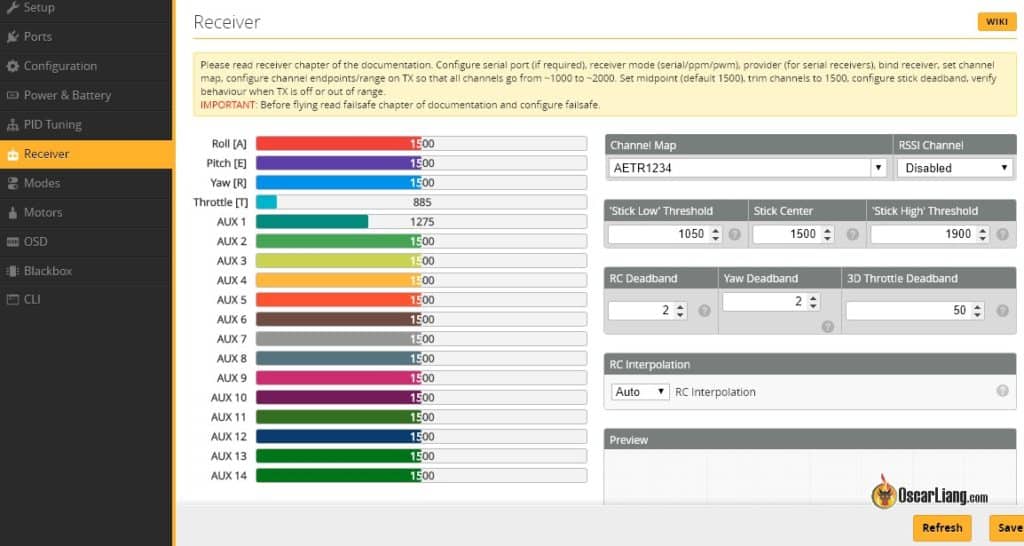
Go to the Receiver tab and ensure the bars move in the correct order according to your stick inputs. Keep in mind that some flight controllers may require a LiPo battery to be plugged in to power up the receiver. If the channel order is incorrect, try a different “channel map” – usually, it’s either TEAR (Default) or AETR for most users. You can fix wrong channel order as explained here: https://oscarliang.com/channel-map/ Also, make sure the bars move in the correct direction: Throttle value increases as you move the throttle stick up Yaw value increases as you move the yaw stick right Pitch value increases as you move the pitch stick up Roll value increases as you move the roll stick rightIf they move in the opposite direction, you can reverse that channel in your radio settings. The steps depend on the radio you use, so it’s best to search online for instructions specific to your model. Test in Acro ModeIf the problem happens when you are in Angle or Horizon mode, it’s worth testing it in Acro mode. Acro mode relies solely on the Gyro and doesn’t use the Accelerometer, whereas Angle and Horizon modes utilize both sensors. An uncalibrated or malfunctioning Accelerometer can cause the flight controller to “freak out” when attempting to take off in Angle or Horizon mode. To address this, try taking off in Acro mode and see what happens. Reset Settings and Update FirmwareIt’s possible that incorrect settings in Betaflight are causing your issue. In this case, consider starting fresh by wiping the entire configuration and start from scratch. You can find the “Reset Settings” button in the Setup tab of the Betaflight Configurator. Remember to backup your settings first: https://oscarliang.com/backup-restore-betaflight-config/ Additionally, it’s a good idea to update your firmware to the latest version to benefit from recent bug fixes and improvements. Here’s a guide on how to update Betaflight firmware: https://oscarliang.com/flash-update-betaflight/ Faulty Motor or ESCIf none of the previous steps have resolved the issue, it’s time to inspect the motors and ESC. A malfunctioning motor or ESC can cause the drone to flip out. If it consistently flips in the same direction, that’s likely the culprit. To determine whether it’s the motor or ESC, try swapping the motor with another one on the same quad and observe if the problem persists with that component. If the problem follows the component, you’ve found the cause. If not, repeat the process with the ESC. 4S is Fine, but Flips Over on 6SThis issue is likely due to a gyro calibration problem. At 6S voltage, there might be more electrical noise coming from the voltage regulator, or other sources that increases the electrical noise floor, preventing the gyro from calibrating properly. It’s best if you could fix the root of the problem, which is the noise issue, but as a quick workaround, you can try increasing the gyro_calib_noise_limit value in CLI. This CLI setting controls how long Betaflight waits to calibrate the gyro zero, as well as how much noise is considered acceptable for completing the calibration. Still Experiencing Issues?If none of these suggestions have resolved your problem, you may have a defective flight controller or a faulty gyro that needs replacement. You might observe symptoms such as a constantly spinning 3D model on the Setup page or a disarm flag indicating “NO GYRO.” If you’re still having trouble, please join our IntoFPV forum where we are more than happy to assist you! ConclusionBy following these essential troubleshooting steps, you can identify and resolve the most common issues that cause FPV drones to flip over during takeoff. With patience and attention to detail, you’ll have your drone back in the air in no time. Edit History Feb 2019 – Tutorial created Apr 2023 – Guide updated beginners |




【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |